咨詢電話
13924666952
400-158-1606


工業(yè)機器人控制系統(tǒng)的路徑引用地址,系統(tǒng)為華成工控系列關節(jié)機器人系統(tǒng),路徑引用界面為機器人控制器的擴展功能。進入界面如下:
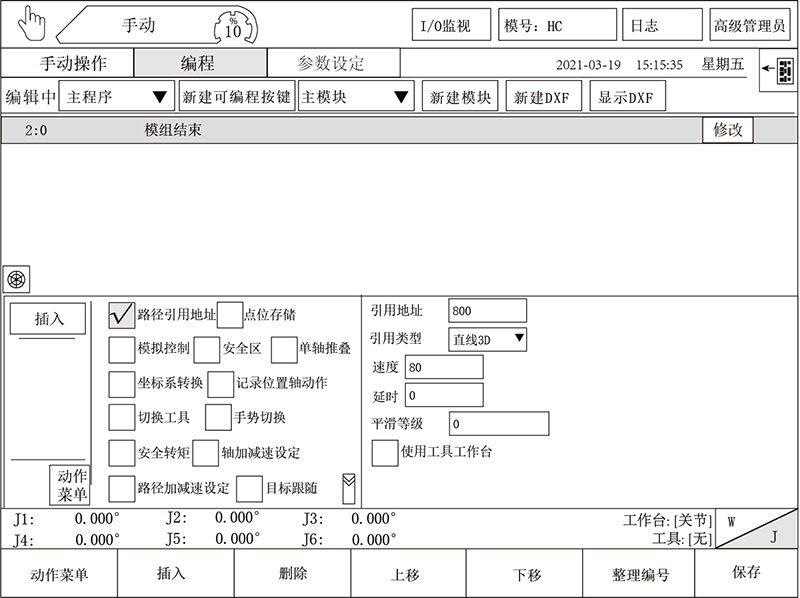
路徑引用地址功能主要是通過引用地址的方式來走路徑。使用此功能需要同時使用數據指令功能先定義地址并給地址進行賦值。
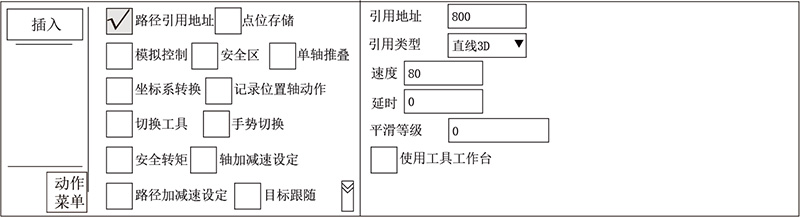
引用地址:可引用800-890的地址。
引用類型:可引用的路徑類型為直線3D、姿勢直線、自由路徑、相對姿勢直線四種。
直線3D:只使用XYZ軸走直線,若引用地址處為800,則默認800地址里的內容賦值給X軸,801地址里的內容賦值給Y軸,802地址里的內容賦值給Z軸。
姿勢直線:使用XYZUVW六個軸走姿勢直線,若引用地址處為800,則默認800地址里的內容賦值給X軸,801地址里的內容賦值給Y軸,802地址里的內容賦值給Z軸,803地址里的內容賦值給U軸,804地址里的內容賦值給V軸,805地址里的內容賦值給W軸。
自由路徑:使用XYZUVW六個軸走自由路徑,若引用地址處為800,則默認800地址里的內容賦值給X軸,801地址里的內容賦值給Y軸,802地址里的內容賦值給Z軸,803地址里的內容賦值給U軸,804地址里的內容賦值給V軸,805地址里的內容賦值給W軸。
相對姿勢直線:使用XYZUVW六個軸走相對姿勢直線,若引用地址處為800,則默認800地址里的內容賦值給X軸偏移,801地址里的內容賦值給Y軸偏移,802地址里的內容賦值給Z軸偏移,803地址里的內容賦值給U軸,804地址里的內容賦值給V軸,805地址里的內容賦值給W軸。
版權所有 ? 深圳市華成工業(yè)控制股份有限公司 未經許可不得復制、轉載或摘編,違者必究 版權聲明
Copyright ? Shenzhen Huacheng Industrial Control Co., Ltd. All Rights Reserved.
網站ICP備案號: 粵ICP備19106162號
技術支持:新新網絡

